
mpu6050-gyro
v1.1.1
Published
Reads roll and pitch from a mpu6050
Maintainers
 kinoki.fr
kinoki.frReadme
mpu6050-gyro
A node driver for the MPU-6050 IMU. Tested and working on Raspberry pi.
Installation
npm install mpu6050-gyroUsage
var gyro = require("mpu6050-gyro");
var address = 0x68; //MPU6050 address
var bus = 1; //i2c bus used
var gyro = new gyro( bus,address );
async function update_telemetry() {
var gyro_xyz = gyro.get_gyro_xyz();
var accel_xyz = gyro.get_accel_xyz();
var gyro_data = {
gyro_xyz: gyro_xyz,
accel_xyz: accel_xyz,
rollpitch: gyro.get_roll_pitch( gyro_xyz, accel_xyz )
}
console.log(gyro_data);
setTimeout(update_telemetry, 500);
}
if ( gyro ) {
update_telemetry();
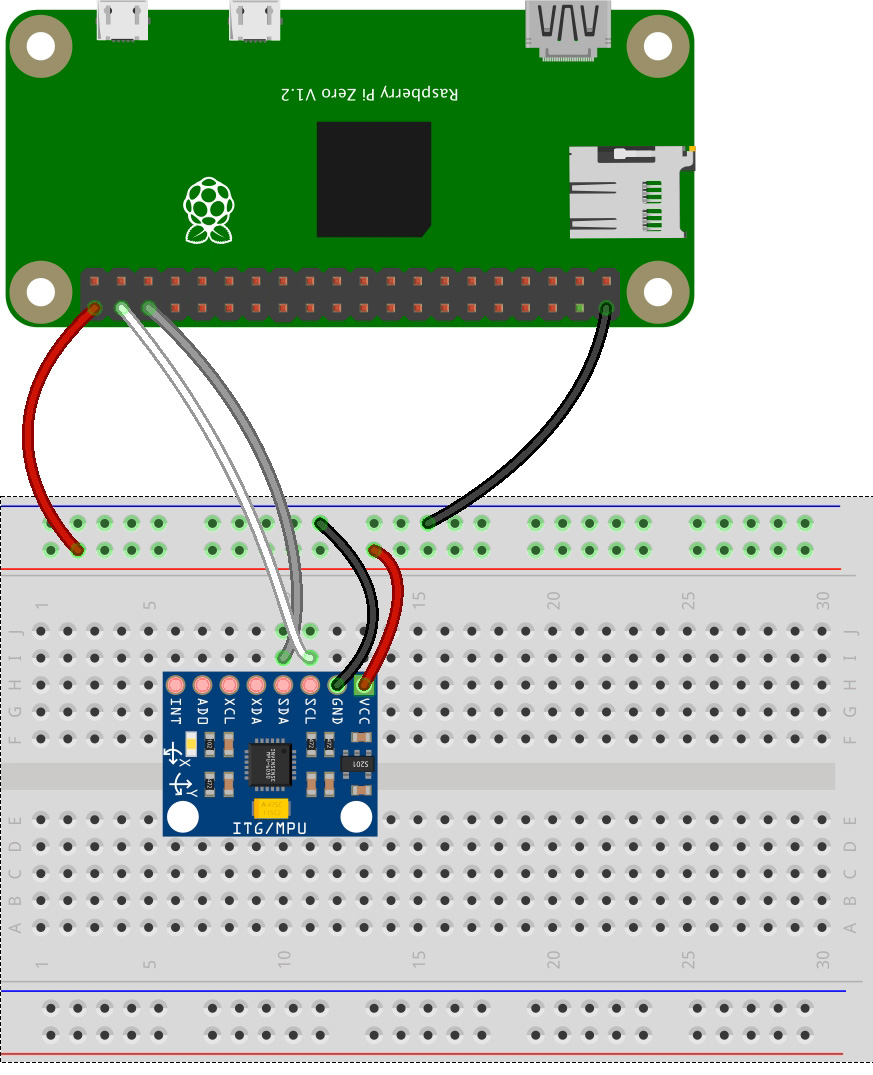
}Hardware setup
This driver reads MPU-6050 datas over I2C. Plug VCC to 3.3V ( pin #1 ), GND to GROUND ( pin #6 ), SDA to SDA ( pin #3 / GPIO 2 ), SCL to SCL ( pin #5 / GPIO 3 ).
Available Methods
gyro.get_gyro_xyz()
Returns JSON object with raw x,y,z datas from gyroscope.
gyro.get_accel_xyz()
Returns JSON object with raw x,y,z datas from accelerometer.
gyro.get_roll_pitch( gyro_xyz, accel_xyz )
Returns JSON object with roll and pitch in degrees.
Contributions
Pull requests welcome.
License
MIT
