serial-servo-control
v0.1.5
Published
Serial Servo Controller (SSC)
Maintainers
 gary.ascuy
gary.ascuyReadme
Serial Servo Controller (SSC)






The main objective of this repository (module), it is compile and have in only one place all the imformation required to use a SSC from computer, like design, software and other kind of things. also the propouse it's have code to manage servos.
TODOs
- Improve events management
- High level commands configuration &&
# Example
const robot = new Robot("commands.yaml");
robot.do('move-arm');
robot.do('stand-up');
## When commands.yaml is
defaults:
time: 0
commands:
move-arm: sequence of actions ... to-be-define maybe same to key-frames.json
stand-up: sequence of actions ...
...
# yep, you can configure with a file a robot and this provides high level commandsDraft - Video Tutorial
https://www.youtube.com/watch?v=YV9r7CbM9Zc
CP210x USB to UART Bridge Virtual COM Port (VCP) Drivers
Install this is required to have a way to control the SSC from computer https://www.silabs.com/products/mcu/Pages/USBtoUARTBridgeVCPDrivers.aspx
How Can I use this?
Install
$ npm i --global serial-servo-controlShow available devices (Serial Ports)
$ ssc devicesShow available examples
$ ssc listExecute examples
$ ssc run open
$ ssc run interactive
$ ssc run sequence --input key-frames.json # JSON OR YAML files# Sequence YAML File Example
# First executes pin "0" to pwm "500", after "2000" milliseconds from start
# Second executes pin "0" to pwm "2500" and pin "1" to pwd "500",
# after "4000" milliseconds from previus step
---
defaults:
time: 2000
keyframes:
-
time: 2000
actions:
0: 500
-
time: 4000
actions:
0: 2500
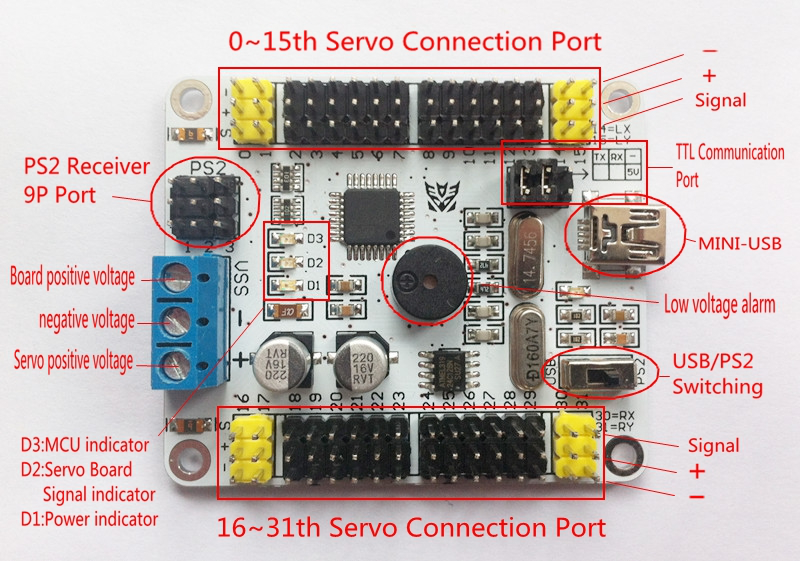
1: 500Diagram
Robots that use SSC
Robo-Soul CR-6 Hexapod Robtics Six-legged 18DOF Spider Robot aliexpress

18DOF Aluminium Hexapod Spider 6Legs Robot Kit w/MG996R Servos ebay

9DOF LTR-4 Turtle Robot Four Feet Frame Kits + LD-2015 Servo aliexpress

6DOF Aluminium Clamp Claw Mount kit Mechanical Robotic Arm+Servo ebay

Contributions
Help me !!! we can create a great module. email me to sync ([email protected]) and let's do it, we can have a good module working together T^T)9